结构光表面标定精度测试记录
##测试条件
- 镜头焦距: 12mm
- 相机像素: 30万(659x494)
- 光源: 630mm普通红色线激光
- 工作距离: 景深约60mm,最低端约150mm。(设备最下端到桌面的距离)
##测试步骤
###相机标定
用棋盘格标定系统,获取相机内参和畸变系数。
标定代码:CameraCalibrate.cpp
###结构光平面标定
使用相机标定得到的内参数矩阵和畸变系数矩阵,采用5*3棋盘格配合黑色激光投影区域的特制标定模板。
###平面精度测试
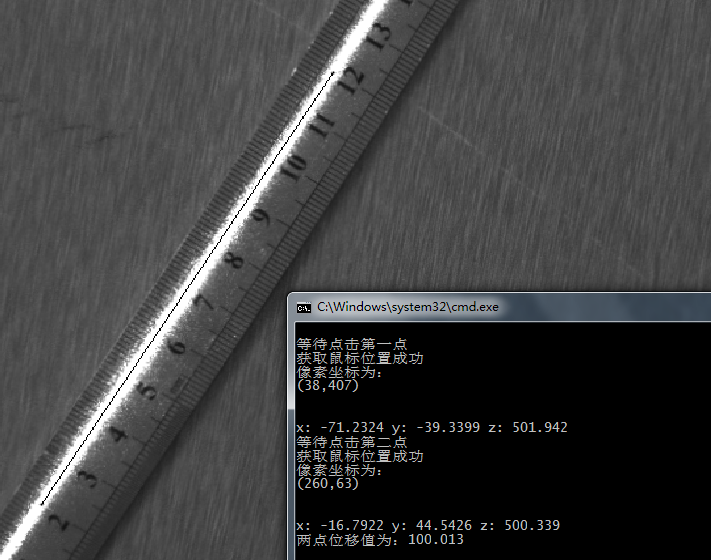
用刻度尺当做被测物,测量实际距离,计算测量误差。
刻度尺姿态:平放桌上。
测试代码:threeDRebuild.cpp
##测试结果:
###Test1:: 测试长度100mm,测量值为100.013mm,误差 < 1mm。
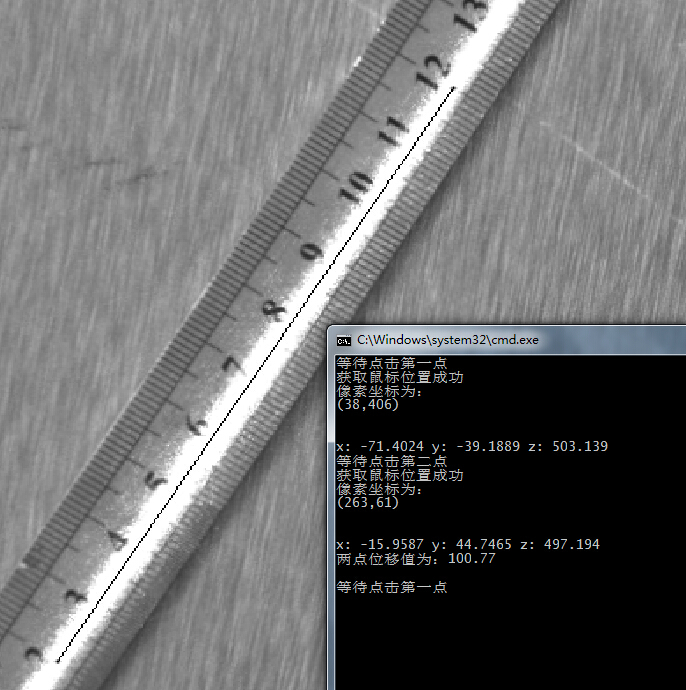
###Test2:测试长度100mm,测量值为100.77mm,误差 < 1mm。
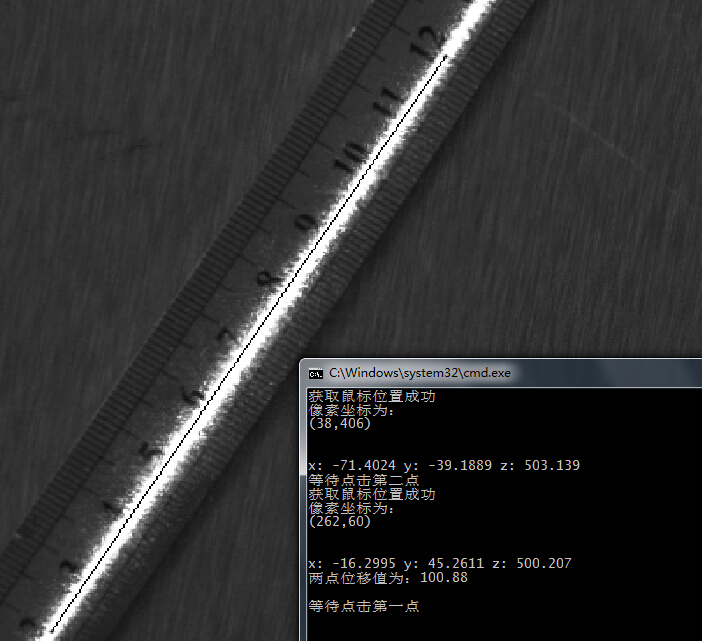
###Test3:测试长度100mm,测量值为100.88mm,误差 < 1mm。
由于测量方法采用手动选点,所以测量精度受人为因素影响较大。在实际结构光三维重构过程中,结构光中心线提取的精度也对重构精度具有很大影响。
与之前同事所设计的结构光平面标定程序比较,精度差别不大,但是程序运行速度更快,代码更少。
#刻度尺倾斜姿态下,精度测量还没有做,有待回到公司后取像测试。
Published 02 May 2015